Kinematics : Speed and acceleration.
Making time a mechanical quantity.
Dynamics :
Conservation of momentum (Newton's three laws).
The introduction below follows roughly the same order of presentation.
For example, we'll avoid "clarifying" the law of the lever
with references to such things as speed and power.
Those concepts were foreign to Archimedes and they would
only contribute to the puzzlement of a beginner
(if one is bold enough to read this).
However, it's occasionally a very good thing to "cheat" by synthesizing
a historical development more efficiently with the benefit of hindsight.
Archimedes certainly knew, at least in special cases, that the product
of the force by the displacement was the same for the input and
the output of mechanical machines.
He didn't give that quantity a name like virtual work, but that's
a relatively insignificant detail. He would certainly have grasped
that idea instantly. Not so with time-dependent mechanical
quantities like speed or power,
which required a major conceptual breakthrough,
15 centuries later (c. 1200 AD).
Likewise, summarizing Newton's three laws by the sole conservation of momentum
may seem bold, but Newton would certainly have understood that.
He would probably have approved that synthetic view.
When it comes to clarifying what momentum really is,
we'll examine the concept beyond the historical context of classical mechanics...
Let's not get ahead of ourselves, though.
As always, the beginning is the proper place to start.
Enjoy the ride.
(2011-01-28) Mechanical Advantage & Statics. (Archimedes)
Applied forces are inversely proportional to their virtual displacements.
Give me a fulcrum and I shall move the World. Archimedes of Syracuse
(c. 287-212 BC)
The intuitive notion of force (in the modern sense of the word)
is well known to
all sentient animals,
including human beings: Two people can push or pull twice as hard
as just one of them...
Archimedes established the less obvious fact that simple passive
machines (lever, inclined plane, etc.) can allow one man to
exert the same force as two men, provided he's willing to do it
over a distance twice as large.
The mechanical advantage of a simple machine
is the ratio of the distance traveled by the exerted force
(along its own direction)
to the corresponding displacement of the load (along the desired direction).
For example, an inclined plane (at an
angle q with the horizontal)
can be used to lift a load vertically.
In this function, its mechanical advantage is:
1 / sin q
This indicates by how much that "machine" reduces the force required to perform the task,
provided there is no
friction at all
(in practice, the friction could be reduced by rollers or lubricants).
Friction is a lesser issue in the case of a lever
(resting on a fixed point, or axis of rotation,
traditionally called a fulcrum) whose mechanical
advantage equals the ratio of distances from
the fulcrum axis to the input and output lines, respectively.
(The angular displacements being equal, because of
the rigidity of the lever, the actual displacements
would be proportional to distances measured along those lines.)
The ratio of the weight moved to the weight moving it
is the inverse ratio of the distances from the fulcrum. "Mechanica"
Peripatetic School (c. 300 BC)
(2011-01-28) Speed and velocity. Birth of Kinematics (c. 1200)
Space traveled per unit of time, a notion due to Gérard de Bruxelles.
The formal notion of speed is due to the early 13th century scholar
Gerard of Brussels
(Gerardus Bruxellensis, fl. 1240 in Brussels)
whose life is almost undocumented.
Gérard de Bruxelles founded Western kinematics
by authoring Liber de motu (Book on Motion)
a treatise which was composed sometime between 1187 and 1260,
according to the definitive work on the subject:
The Science of Mechanics in the Middle Ages (1959) by
Marshall
Clagett (1916-2005).
Unlike the ancient Greeks, Gerard of Brussels allowed
quotients of dissimilar quantities as legitimate objects of study. (viz. distance over time).
In English and French, the word "ratio" is best reserved for the dimensionless
result which comes from dividing two quantities of the same nature.
When there's no such restriction, the word "quotient" is preferred.
(Example.)
Gérard thus paved the way for the next generation of kinematicists
who would further focus on the concept of acceleration,
including the Oxford calculators at Merton College
(discussed next)
Nicolas Oresme (1323-1382) in France and
Casale
(Giovanni di Casali, c.1310?-1375) in Italy.
(2011-01-28) The Mean-Speed Theorem
or Merton Rule (c. 1340)
The distance traveled at constant acceleration is what would be traveled at a
steady speed equal to half the sum of the initial and final velocities.
The four
Oxford calculators
listed below made good use of that
theorem
(credited to Bradwardine).
They were all associated with
Merton College,
after which the result is named.
The godfather of the group was
Walter Burley (c. 1275-1344)
nemesis of William of Ockham (c. 1288-1348).
John Suisset, the Calculator :
Richard Swineshead (c. 1323?-1354).
He appears in
Cardano's famous list of the
12 Greatest Minds.
The theorem is actually a vectorial relation (call it the mean-velocity theorem,
if you must) which is easy to prove anachronistically
using the tools of calculus:
Let's call r the position
(viz. the radius vector):
The velocity is dr/dt = v.
The acceleration dv/dt = g is constant.
We may, therefore, integrate twice
successively to obtain:
v = v0 + t g
and
r = r0 +
t v0 + ½ t 2g
That last relation implies that r remains in a plane
parallel to ( g , vo ).
Eliminating t g between the two equations, we obtain the advertised result:
The Mean-Speed Theorem
r = r0 +
t (v0 + v) / 2
If anything, this vectorial relation is most commonly stated and/or used
for a single component.
The result does apply to the vertical position of a falling object
(near the surface of the Earth)
but it was obtained
well before that application was known to be a valid one
(Galileo established experimentally that
falling objects have a constant acceleration only some 250 years later).
The one-dimensional Merton rule can also be used for angular displacements
or any other type of quantity known to undergo a constant acceleration.
The rate of change in acceleration is called jerk.
The Merton rule can be said to apply to jerkless motion
(although that modern term is rarely used).
(2004-10-15) The first scientific unit of time:
Galileo's tempo.
Reviving a dimensionless constant of great historical interest...
Time is defined so that motion looks simple. J. Henri Poincaré,
as quoted by John A. Wheeler
in Gravitation (1973) Misner, Thorne & Wheeler.
Arguably, the scientific revolution in Physics started in 1581
when Galileo Galilei (1564-1642)
discovered the
isochronism of the pendulum, namely the fact that a given
pendulum oscillates with the same period regardless of its amplitude
(as long as that amplitude is not too large).
To do that, he had to use his own pulse as a timer, because nothing
else was yet available...
The earliest unit of time used in experimental physics was the
tempo (plural: tempi)
devised by Galileo to establish experimentally the
pendulum law, which says that the length of a pendulum
is proportional to the square of its period of oscillation
(at least for small amplitudes).
At first, Galileo had worked without a precise device to
measure time intervals and he relied on his own pulse
(and/or on his musical instincts, as discussed below).
Next, he invented a device which let water flow during
each motion he wanted to time.
Assuming the flow had a constant rate,
he would measure the time ellapsed by weighing the water collected.
For example, he obtained 903 grains of water during a fall from rest
through 2000 punti (about 1.88 m).
He then defined his new unit of time, the tempo, as
corresponding to 16 grains of water on this particular device.
Thus, Galileo's tempo was roughly equal to 11 ms.
The precision of Galileo's experiments can be established from one number,
which he derived experimentally,
although it happens to be a pure number
(depending neither on the local value of the
gravitational field nor on the unit of length he used):
Galileo determined the length R (in punti)
of a pendulum which swings from rest (at a small angle)
to its vertical position during
the time it takes for a body to fall from a height H of
2000 punti (about 1.88 m).
He did that by releasing the pendulum's bob and the falling body simultaneously
and listening to their respective bangs upon arrival.
He changed the length of the pendulum until those arrivals sounded simultaneous,
which is "musically" so when the discrepancy is
below 10 milliseconds or so
(this is, most probably, why Galileo chose his basic unit of time to have the
aforementioned order of magnitude).
The modern answer (under ideal conditions) is that
R/H is 8/p2, so R
is about 1621.14 punti,
irrespective of the value of a punta (singular of
punti).
The experimental value obtained by Galileo was 1590 punti.
This precision does correspond to a timing error of less than 10 ms,
as advertised.
Brian Kieffer (2011-05-10,
Yahoo!) True period of a pendulum.
What is the period of a pendulum for large swings?
After Galileo first described the
law of the pendulum and the
law of falling bodies,
a century would ellapse before Newtonian dynamics
offered both laws a common rational explanation, which is now commonplace.
For small oscillations of the pendulum, this has provided a precise theoretical value
(8/p2 ) for
the constant discussed in the previous section, which
Galileo could only obtain experimentally.
The motion of a simple pendulum in a vertical plane
is always discussed at the introductory level (slightly generalized details
are presented elsewhere on this site).
The angle q between the local vertical
(gravitational field g)
and a pendulum of length L obeys the following
differential equation:
q'' + (g / L)
sin q = 0
For small oscillations, sin q
is nearly equal to q and the following
differential equation is thus approximately satisfied:
q'' + (g / L)
q = 0
The solution is a so-called
simple harmonic motion expressed by:
q =
A cos ( w ( t-t0 ) )
[ A and t0 are arbitrary constants ]
The pulsatance
w = Ö(g/L)
does not depend on the amplitude (A) of the oscillation,
neither does the period
T = 2p/w...
That statement is the so-called isochronism of small swings
observed by Galileo in 1581.
Period of a Pendulum of Length L
(small swings)
T0 = 2 p
Ö
L
g
In older texts,
the quantity most often quoted was the time of swing
(equal to half the period) which is the time it takes for the pendulum to swing from
its leftmost to its rightmost position. Before another view prevailed,
it was suggested that the then-to-be-defined
meter unit ought
to be the length of a pendulum beating one second.
Under the current definition,
a one-meter pendulum beats about 1.0032 s
at sea-level and mid-latitude, which means that its period is about 2.0064 s.
What about large oscillations?
Choosing the unit of time so the small-swing period
T0 is 2p, we have:
q'' + sin q
= 0
Let's call A the amplitude of the motion, which
we may define as the positive value of q for which
q' is zero. By multiplying the
above equation into q', we see that the left-hand
side of the following equation is constant, since its derivative vanishes
(it's essentially the total mechanical energy).
½ ( q' ) 2
- cos q
= - cos A
Introducing the notations k = sin A/2 and
x = (sin q/2) / k we obtain:
( q' ) 2 =
2 (cos q - cos A) =
4 [ sin2(A/2) -
sin2(q/2) ]
= 4 k2 (1 - x 2 )
By the chain rule,
dx/dt = x' =
q' cos(q/2) / 2k.
Therefore:
This gives t as the following indefinite integral of a
function of x,
endowed with a sign that changes twice per period (every
time x reaches an extremum, as it
oscillates back and forth between -1 and +1).
I wouldn't dare write |dx| instead of the less objectionable
± dx but that's the idea...
t =
ò
± dx
Ö
( 1 - x2 )
( 1 - k2 x2 )
That integral is known as the elliptic integral of the first kind.
It can pop up in various guises; this particular one is called the
Legendre normal form.
Elliptic integrals can't be expressed in terms of elementary functions.
The complete elliptic integral of the first kind is
the definite integral:
K(k) =
ò
1
dx
0
Ö
( 1 - x2 )
( 1 - k2 x2 )
Traditionally, k is called the modulus
of this elliptic integral or its relatives.
As x goes from 0 to 1, the angle
q goes from 0 to A and the time
t increases by one fourth of the true period
(measured in our special unit of time
where the small-swing period is
2p).
Therefore, going back to arbitrary units of time:
The arithmetic-geometric mean (AGM)
of two numbers is recursively defined as the AGM of their arithmetic mean (half-sum)
and geometric mean (the square root of their product).
In particular:
agm (1-k , 1+k) =
agm (1 , Ö(1-k2 ) ).
Since k = sin(A/2) this translates into
the following robust expression:
True Period of the Pendulum
T = T0 / agm ( 1 , cos A/2 )
That elegant formula is all we really need to compute
the true period T very efficiently
(with or without a computer)
since the recursive way to compute an AGM converges quadratically
(i.e., the number of correct digits roughly doubles with each iteration).
That is so even when A is close to the disallowed maximum of
180° = p. For example:
A
k = sin A/2
T / T0
0.01°
0.0000872664625
1.00000000190
0.1°
0.0008726645152
1.00000019039
1°
0.0087265354983
1.00001903892
5°
0.0436193873653
1.00047617249
10°
0.0871557427477
1.00190718814
30°
0.2588190451025
1.01740879760
60°
0.5
1.07318200715
90°
0.7071067811866
1.18034059902
120°
0.8660254037844
1.28434402576
150°
0.9659258262891
1.76220372950
170°
0.9961946980917
2.43936271967
175°
0.9990482215819
2.87766351235
179°
0.9999619230642
3.90106516039
179.9°
0.9999996192282
5.36686710903
179.99°
0.9999999961923
6.83273733801
180°
1
¥
For a release angle of 90°,
T/T0 = GÖ2, where G
is Gauss's constant.
Of course, release angles above 90° are only possible with
a rigid pendulum;
the usual bob-on-a-string won't do.
We may now investigate the
relevant power series, using the expansion
(A002894)
of K(k) that involves squares of central
choice numbers :
¥
T = 2p
Ö
L
g
å
n=0
(
2n n
)
2
(
¼
sin A/2 ) 2n
Expanding each term of that sum as a power series of A and collecting
like terms, we obtain a power series of A with rational coefficients
(since every coefficient is obtained as a sum of finitely many rationals):
True Period of a Pendulum of Length L
(swings of finite amplitude A )
T = 2p
Ö
L
[
1+
A2
+
11 A4
+
173 A6
+
22931 A8
+
...
]
g
16
3072
737280
1321205760
Here are the next terms of the above bracketed power series:
Although the radius of convergence of that
power series is [ probably ] p,
it ought to be shunned for precise numerical computations, in favor of the
above simpler, faster and more robust
arithmetic-geometric formula.
(2011-01-28) The trajectory of a cannonball is a parabola.
Smoothly combining a vertical fall and a uniform horizontal motion.
Starting in
.../... "law of odd numbers" => "law of falling bodies"
At time t, the projectile's cartesian coordinates are:
x = (v0 cos j) t
y = (v0 sin j) t
- ½ g t 2
The range d is the value of x at the time t
when y returns to zero:
t = (2 v0 / g) sin j
d = (v02 / g) sin 2j
The maximum range (v02 / g) is thus obtained
for a tilt j = 45°.
The top height h (the value of y when
t = t/2) is one fourth of the height of the
right triangle whose base is the range d and whose hypotenuse is in the direction of the initial
velocity (use the above picture to memorize that).
h = ¼ d tg j
= (v0 sin j) 2 / 2g
Gunner Firing a Cannon
(1561), Unknown artist.
In "Problematum Astronomicorum et Geometricorum" by
Noviomagus = Daniel Santbech (Basel, 1561).
Before
the scientific method
required theories to be matched with observations,
Aristotelian concepts did not allow for several
simultaneous natural motions.
As illustrated by the woodcut at left,
it was thus taught (not thought)
that an object thrown up in the air
was endowed with something called an impetus which made it
move in a straight line (what else?) until that impetus wore off,
at which point the object fell vertically in a straight line !
Aristotelian physics predicted that the high
point (F) in the trajectory of a cannonball was four times
higher (!!) than the top of the Galilean parabola.
It wouldn't be fair to Noviomagus
and other expert gunners of that era to suppose that they hadn't
noticed that actual cannonball trajectories didn't
fit Aristotelian triangles at all.
The gunners chose to overlook such obvious shortcomings because
their beloved Aristotelian theories did provide
the correct relation between range and tilt,
which is really all you need to operate a cannon, at least when the target is
level with it
(Aristotelian physics doesn't give correct predictions in other cases).
(2011-01-28) Conservation of Momentum (1666, 1687)
The key to Newton's three laws of motion.
The notion of inertia was originally not part of Aristotelian physics.
It was conceived by Ibn Sena (980-1037)
and formally introduced, around 1340, by Jean Buridan
(Johannes Buridanus)
who proposed that a moving body is endowed with a so-called impetus
directly proportional to its mass and its velocity.
Three centuries later,
Isaac Newton (1643-1727)
figured out for himself the fundamental principles of dynamics in 1666,
at the age of 23. He published them formally as a set of
three laws more than 20 years later (in 1687).
Motion remains uniform, unless disturbed by a force.
Force is the rate of change of momentum: F = dp/dt
with p = mv.
Every force is opposed to another force of equal magnitude.
In retrospect, Newton simply equated Buridan's impetus
to the product (p) of the velocity (v)
of an object into a constant, called its mass (m).
He realized that this is a conserved vectorial
quantity (now called linear momentum)
which can be exchanged between separate systems but can
be neither created nor destroyed. Ever.
So say the three laws.
The linear momentum of a system is the sum of the linear momenta of its components.
The force between two systems is the rate at which they exchange momentum over time.
(2007-10-31) The Work-Energy Theorem:
The work done is equal to the change in kinetic energy.
The infinitesimal work done by the resultant F
of all the forces applied
(including conservative forces and dissipative friction forces)
to a point-mass of velocity v
is equal to the dot product
of that force into the displacement (v dt) of its
point of application during a time dt. Namely:
F . v dt =
m (dv/dt) . v dt =
m v . dv =
d ( ½ m v 2 )
Therefore, the work done over any interval of time is equal to
the variation of what's called the kinetic energy
of the point-mass, namely ½ m v2.
E = 1/2 m v 2
The modern nomenclature
(French: travail &
énergie cinétique)
for that clean result is due to
Gustave Gaspard de Coriolis (1792-1843).
The concept of kinetic energy had been advocated by
Emilie
du Châtelet (1706-1749) in 1740.
She combined the ideas of
Leibniz with the observations of
Willem's Gravesande (1688-1742).
The above computation may serve as an introduction to the modern concept of energy,
which is often credited to Thomas Young (1807)
and whose relativistic generalization is presented in the
next section.
The word itself was coined by Aristotle
(energeia) and had been used by theologers and
philosophers since the fourth century AD.
(2008-09-18) Relativistic Kinetic Energy (Einstein, 1905)
Based on the relativistic expression of the work done to a point mass.
Are not the gross bodies and light convertible into one another ?
Isaac Newton (Query 30, 1717)
The following two articles clarify the
above notion of energy by putting it in the less forgiving
context of Special Relativity.
This is primarily meant for people who have already wrestled with the concept
for a while,
although any reader familiar with calculus and
basic Newtonian mechanics
(F = m a)
needs only accept the single statement of the following paragraph to
benefit from the rest of the discussion...
In Special Relativity,
the dynamics of a point-mass are still described by the Newtonian
relation F = dp/dt provided the momentump is redefined as follows for a nonzero mass m at speed v:
p =
m v
Ö
1 - v2/c2
The limiting case allows particles of zero mass traveling (only) at speed c.
An erroneous principle F = m d(p/m)/dt
was once proposed by some authors, including
Heinrich Ott
(1962) and
Henri Arzeliès (1965)
in the context of relativistic thermodynamics
where m varies (see below).
The issue is a delicate one and the controversy is often revived by greenhorns.
The Ott-Arzelies formulation was rebutted by Guessous
(1967) and
ruled out experimentally by Pemmaraju Ammiraju
(1984).
The fundamental issues of "dissipative mechanics", involving
variable rest masses, were carefully discussed by Jean Fronteau (1973).
In this, c is the speed of light
(Einstein's constant).
Assuming the
rest mass (m) to be constant,
we may differentiate
this (vectorial) expression:
dp =
m dv
+
m (v.dv/c2 ) v
Ö
1 - v2/c2
(1 - v2/c2 ) 3/2
Dotting that into v, we obtain an expression of
v.dp which boils down to:
v . dp =
m v . dv
= d (
m c2
)
(1 - v2/c2 ) 3/2
Ö
1 - v2/c2
The above expression of the work done
is thus only slightly modified:
F . v dt =
(dp/dt) . v dt =
v . dp
= d (
m c2
)
Ö
1 - v2/c2
This yields the following
relativistic equivalent of kinetic energy (up to an additive constant)
for a pointlike particle of constant mass, first given by
Albert Einstein in 1905:
E =
m c2
Ö
1 - v2/c2
Using the above value of p, we get:
E2 - ( c p ) 2
= ( m c2 ) 2
Thus, E = m c2 Ö(1 + p2/ mc)
So, at low speed, we have
E »
mc 2 + ½ mv 2
»
m c 2 + ½ p 2/m.
Those correspond to the first two terms in the Taylor expansions of the above relativistic value
of E/mc2 using either x = v/c or y = p/mc :
The constant leading term seems irrelevant at first.
However, Einstein postulated that it corresponds
to a real energy at rest which anything of mass
m always possesses.
That's the principle of inertia of energy :
E = m c 2
The more general relation shown above remains valid for photons (m=0):
E2 = (m c2 ) 2 + ( c p ) 2
When the energy of a system at rest increases, so does its mass.
The next section investigates the fundamentals of what's involved in such a process.
(2008-09-18) Basic Relativistic Thermodynamics
Variable rest mass in the case of a pointlike system.
If a pointlike object is somehow endowed with a structure that
allows it to store energy at rest (e.g., spin or heat)
then its rest mass (m) may vary.
Redoing the above computation to allow for that, we
find that v.dp is the sum of two terms.
The first one can be deduced from our previous computation
(at constant m) whereas the second one comes from the fact that
p is proportional to m:
v . dp =
m d (
c2
) +
v2 dm
Ö
1 - v2/c2
Ö
1 - v2/c2
With the proper algebraic massaging, this differential relation becomes:
d (
m c2
)
=
v .dp
+
Ö
1 - v2/c2
d ( mc2 )
Ö
1 - v2/c2
dE
=
dW
+
dQ
This is actually one enlightening case of the
first principle of thermodynamics :
The variation in the energy of this simple
system is an exact total differential (dE)
of the parameters which describe it (m and v).
This differential form is equated
to the sum of two infinitesimal quantities which are not
exact total differentials themselves; the "work"
(dW) and "heat"
(dQ) received by our point-mass.
rsg160 (2001-04-15)
I have been told that a satellite in a circular orbit that starts
to enter the atmosphere actually speeds up, at first.
When the satellite is outside the atmosphere there are only conservative forces (gravity)
acting and, if the satellite is in a circular orbit, its [speed] is constant.
When it starts to enter the atmosphere there is a small drag force,
since the atmosphere is thin high up.
This force always opposes the motion and I would have guessed that it would slow
the satellite down.
Can you help me in figuring out why the satellite actually speeds up?
Indeed, as long as the drag force remains small, the satellite will gain speed,
because speed increases as altitude decreases.
A drag force cannot change that trend unless it's large enough.
The key point is that a spacecraft loses altitude
at a steady rate during reentry.
It's fairly easy to work this out quantitatively:
Let's call M the mass of the satellite, V its speed and z its altitude.
Let R be the radius of the Earth
(assuming its mass distribution has perfect spherical symmetry)
and let's call g the gravitational field at z = 0.
The kinetic energy of the spacecraft is ½MV 2
and its potential energy is exactly Mgz/(1+z/R)
(normalized to 0 when z = 0; it's about Mgz when z is small).
The sum of these two terms is the total energy E,
which is constant in the absence of drag.
In the presence of a drag force F
(in a direction opposite to that of the velocity),
there's a loss of total energy equal to the power FV of the drag force.
In other words, E' = - FV.
We may use the above expression of E in this,
neglecting the 1/(1+z/R) correction factor for the potential energy
(thus making an error on the order of 1%) and obtain the relation:
M ( V V' + gz' ) = - FV
Now, we may remark that the quantity (-z' )/ V
is simply sin(a),
the sine of the angle of reentry a
(this is a positive quantity since z is decreasing,
it would be zero for horizontal flight).
Therefore, the above relation translates into:
dV/dt = V' = g sin(a) - F/M
As long as the drag force F is less than
Mg sin(a),
V' is therefore a positive quantity,
which means that the spacecraft will indeed gain speed initially.
For proper re-entry the angle of reentry a
cannot be too small, or else the spacecraft could "bounce" off the atmosphere and be back
into outer space after losing just a little bit of energy.
If no action is taken, an orbiting spacecraft could thus keep bouncing back until
enough energy is lost and/or its reentry angle is sufficiently large
--possibly dangerously so,
since a large a means fast reentry and a lot of heat!
As the atmosphere becomes denser at lower altitudes,
the drag force F will eventually exceed the above threshold and the spacecraft will slow down.
(2002-01-27) Lewis Carroll's Monkey
Consider an equilibrium realized when a "perfect"
rope is passed over a frictionless and massless pulley with a ten-pound weight on
one side and a ten-pound monkey on the other...
What happens when the monkey decides to climb up the rope?
This problem was popularized by the author of Alice in Wonderland,
Lewis Carroll
(1832-1898, né Charles Dodgson),
who agonized over it. He was a
professor of mathematics at Oxford from 1855 to 1881.
The above picture once illustrated a discussion of the puzzle by the
mathematical columnist Sam Loyd (1841-1911), who called the problem
"Lewis Carroll's Monkey Puzzle", while stating that it was not known whether
Lewis Carroll originated the question.
(Unfortunately, the solution given by Loyd happens to be erroneous.)
The answer is that the centers of inertia of the weight and the monkey will have
the same vertical motion
(we assume, of course, that the monkey only goes up or down but does not swing the rope).
Thus, if the monkey and the weight are initially motionless at the same height,
they will always face each other no matter what the monkey does.
For example, they will both be in free fall if the monkey lets go of the rope,
and both falls stop when the monkey grabs the rope again.
The reason for this is simply that all the forces that are acting on either the monkey or the
balancing weight are always equal.
There are only two such forces for each body; the downward weight
and the upward tension of the rope.
The weights are equal because the two bodies have the same mass
and the rope also exerts the same force on either body because of the numerous "ideal"
assumptions made here, including the absence of swinging on the monkey's side (so that
the rope exerts only a vertical force in either case).
It's also essential to assume not only the lack of any friction, but also the absence of
mass for both pulley and rope (otherwise the rope's tension would not be the same on
either side of an accelerating pulley and it would vary along the length of an accelerating
rope).
Note also that a "perfect" rope retains its length and transmits instantly any change in
its tension. This is clearly unrealistic but it's logically
consistent with the axioms of classical
(non-relativistic) mechanics.
When the same forces act on bodies of equal masses their speeds change in the same way,
so that the speeds remain equal if they are originally so (and we're told here of an
original equilibrium where both speeds are zero).
Both motions will therefore mirror each other.
From the monkey's perspective, pulling 2 feet of rope will get him only 1 foot higher
from the ground, but will
require as much effort (work)
as would be necessary to climb 2 feet on a stationary rope.
That's not surprising in view of the fact that 20 lb were lifted one foot in the
process (the monkey and the weight went up one foot each), which is just as difficult a
task for a 10 lb monkey as lifting his own weight up two feet...
This deceptively simple puzzle is an excellent way to start a healthy
discussion
about the fundamental principles of classical mechanics.
(2007-01-03) Galilean Cannon
A heavy ball is dropped on a hard floor from a height
of one foot with a light ball (ping-pong ball) on top of it.
How high could the light ball bounce?
Answer : Up to 9 feet !
Explanation :
Shortly before impact, both balls have the same downward speed V.
An elastic bounce off the floor makes the heavy ball go upward at speed V
to meet the light ball still going downward at speed V.
The speed of the ping-pong ball relative
to the heavy ball is thus 2V. Upon impact of the two balls that speed
reverses itself (since the mass ratio of the two balls is very large).
An upward speed of 2V relative to the heavy ball translates
into an upward speed of 3V...
Ideally, the kinetic energy
of the ping-pong ball thus goes from
½ mV2before impact to 9 times that much after the shock !
This is enough to propel that ball
up to 9 times the height it was dropped from.
In practice, a lesser height is reached
(because of imperfect elasticity and a finite mass ratio)
but the actual demonstration remains impressive.
(2007-10-09) Tangential and Normal Accelerations
The tangential acceleration is dv/dt.
The normal acceleration is v2/R.
Consider a smooth curve in space. Let s be the curvilinear
abcissa along that curve and T = T(s)
a unit vector tangent to the curve in the direction of
increase of s. Geometrically, the
curvature
1/R at s can be defined
as the length
of the vector dT/ds = N/R
(which is perpendicular to T,
since the length of T remains constant).
R is called the radius of curvature at that point.
When such a curve is the trajectory of a point-mass traveling at speed
v = ds/dt
its [vectorial] velocity is v T.
The acceleration of that point-mass is thus:
a = d(vT)/dt =
(dv/dt) T + v dT/dt =
(dv/dt) T + (v2/R) N
This means that the component of the acceleration which is perpendicular to
the trajectory has magnitude v2/R
(speed squared divided by radius of curvature).
(2007-10-09) Loop-the-Loop in a Roller Coaster
(teardrop shaped)
Harnesses shouldn't be needed to keep riders on their seats.
Traditional roller-coasters rides are designed so that a component
of the acceleration always makes the wheels of the car push against the
tracks and/or the bodies of the riders push against the seat cushions.
Loop-the-Loop at Coney Island
(1901-1910)
This was the first
noncircular
roller-coaster loop (the smaller radius of curvature at the top makes it safe at lower
speeds) based on a
patent awarded to
Edwin
Prescott (1841-1931) on Feb. 5, 1901.
At the top of a vertical loop
(where riders are upside down) either condition means that the
normal acceleration
exceeds the vertical acceleration of gravity.
v2 / R > g
On the other hand, we have:
m g h > ½ m v2
This expresses that the gravitational energy obtained by
releasing a car of mass m from a height h
above the top of
the loop is greater than the kinetic energy it retains at
that point (the two would be equal if there was no loss
of mechanical energy due to friction).
Therefore:
h > ½ R
Thus, a roller-coaster car must be released from
a height above the top of a loop-the-loop (much) greater than half the
top radius of curvature.
(2007-10-18)
The Conical Pendulum
A hanging bob traveling along an horizontal circle.
Let L be the length of the string and q
the (constant) angle it makes with the vertical. The radius R
of the trajectory is:
R = L sin q
The horizontal centripetal acceleration is
v2/R = w2 R,
as the bob travels around the circle at speed
v = wR.
(This is a special case of the normal acceleration
discussed above.)
Newton's law says that this acceleration multiplied by the mass m
of the bob is is the
vector sum of all the applied forces, namely the
weight (mg) and the string tension (F).
The magnitudes of the relevant components of the
acceleration are thus obtained as the sides of the right triangle
pictured at right (featuring the aforementioned angle
q ).
Thus, v2 =
R g tan q =
L g sin2 q
/ cos q =
L g (1-u2 ) / u
which can be recast into the following quadratic equation, with
respect to u = cos q :
u 2 + ( v 2 / Lg ) u
- 1 = 0
Solving for u, we retain only the solution that's between 0 and 1.
We obtain:
cos q = u =
( 1 + x2 )½ - x
where x =
v2 / 2Lg
To solve this,
we put x = sh j
and find that u = e j.
In other words:
q = arccos (exp (argsh
( v2 / 2Lg )))
v 2 =
2 L g sh ( ln cos q )
(2011-01-11) String tension T of a
constrained conical pendulum.
Let the above hang from the top of a hemisphere
of radius a > L/Ö2
We assume that a large enough orbital speed v makes the (pointlike) bob
touch the hemisphere and that there's no friction.
The trajectory of the bob is a horizontal circle of radius x
at a height y > 0 above the horizontal plane
of the constraining hemisphere's equator.
To obtain x & y
in terms of L & a we use Pythagoras' theorem twice:
x 2 + y 2 = a 2
x 2 + (a-y)2 = L2
By subtraction, we have 2 a y =
2 a 2 - L2
which gives a value of y that can be plugged into either equation to obtain
x > 0.
y = a
[ 1 - ½ (L/a)2 ]
and
x = L
[ 1 - ¼ (L/a)2 ]
½
To obtain the tension T of the string, we may project
Newton's second law
on the direction parallel to (y, -x) since the unknown
reaction of the sphere is perpendicular to that
(it's normal to the surface and, therefore, it's
in the direction of the (x, y) vector).
The mass m multiplied into the centripetal
(horizontal) acceleration so projected is equal to the sum of the
respective projections of the bob's weight and of the tension force acting on it:
This boils down to the simple expression:
T = m [ g + y.v2/x2 ] L/a
Using the angular velocity w = v/x
and the above value of y, we obtain:
T = m g L/a + [ 1 -
½ (L/a)2 ]
m L w2
(2008-02-13) Ball in a Bowl
The motion of a small ball rolling at the bottom of a spherical bowl.
A ball released at zero speed on a spherical surface moves in a vertical plane.
Let R be the radius of that spherical bowl.
The radius of the ball is r < R.
The mass of the ball is M and its
moment of inertia is J.
Let O be the center of the spherical bowl
and C be the center of the small ball.
q is the (oriented) angle from the vertical to OC
and q' is the derivative
dq/dt.
In a pure roll, the point of contact of the ball with the spherical
surface has zero speed.
Since the speed of C is
(R-r) q',
we may deduce that the ball spins with angular velocity
(1-R/r) q'.
The potential energy of the ball is
-M g (R-r) cos q
(up to an irrelevant additive constant).
Therefore, the following expression is equal to the
total mechanical energy, which remains constant:
½ [ M + J/r2 ] (R-r)2
(q' )2
-
M g (R-r) cos q
For an homogeneous ball, J = 2/5 M r 2
(therefore, 2/7 of the kinetic energy is rotational energy).
The derivative of the above boils down to:
7/5 (R-r)
q''
+
g sin q = 0
A simple pendulum of length 40% longer than
OC = R-r would obey the same equation
(a 40% longer length means an 18.3% longer period).
brentw (Brent Watts of Hickory, NC.
2001-05-04)
A 24 lb weight, attached to the end of a spring, stretches it 4 inches...
What is the equation of motion if the mass is released from rest
from a point 3 inches above the equilibrium position?
An oscillation where the acceleration is proportional to the distance from a fixed point
is a sinusoidal motion about that point,
commonly known as a simple harmonic motion
(SHM).
Hooke's law
states that the force exerted by a spring is proportional to its elongation.
Under standard gravity (g=9.80665 m/s2),
the weight (force) Mg of a mass M of 24 lb (10.88621688 kg)
is 24 lbf (106.757318766 N).
If this corresponds to an elongation of magnitude L=4 inches (0.1016 m),
the force corresponding to an elongation y is therefore -y(Mg/L).
Now, if we decide to count upward elongations positively,
the acceleration y" is therefore such that My"=-Mg-y(Mg/L) (Newton's Law).
If we consider instead the position x=y-L above the equilibrium position,
we have x"+(g/L)x=0 (in the absence of friction or damping).
Introducing the quantity w such that
w2=g/L
(in other words w is
Ö(9.80665/0.1016)
or about 9.82457 rad/s), x is therefore equal to
A cos(wt) +
B sin(wt), for some constants A and B.
Since we are told that, at t=0, x is 3 inches and the speed x' is zero
(the mass is just "released from rest"),
we know that B is zero and A is 3 inches (76.2 mm).
Therefore, the equation of motion is simply
x = A cos(wt),
with A=3"=76.2 mm and
w=9.82456847...rad/s
(corresponding to a period of oscillation T=2p/w
of about 0.64 seconds).
Note that the value of the mass M turns out to be irrelevant here
(the only thing that matters is the magnitude L of the elongation at rest),
but the value of the gravitational field g does matter:
The value of the period of oscillation T
would be different under a gravitational field other than the "standard" one.
gatman
(Central Florida. 2001-03-31)
How fast (rpm and mph) are
electrons going around a nucleus?
What factors affect it and how?
For small objects like electrons, quantum mechanics states that
the very notion of trajectory breaks down.
You can't measure both the momentum and the position of a particle:
The product of the uncertainties in the measurements of such conjugate
quantities cannot be less than the so-called
Heisenberg limit.
Thus, the electron does not have a precise speed in the classical sense.
However, you can work out what the expected value of the momentum would be
if you were to measure it with infinite precision
(which would mean, then, that you would not know at all where the electron is).
From that momentum, you may derive some kind of expected speed...
This being said (and it had to be said),
you may work out things numerically using something as crude as the
old-fashioned semi-classical Bohr model of the atom
(circular "trajectories" --oh, well-- with an angular momentum which
is only allowed to be n times the
rationalized Planck constant "h-bar"
= h/2p).
The number n is the principal quantum number
you may find listed in chemistry books;
it's normally equal to 1 for the electron around an hydrogen nucleus.
All told, you'll find that the binding energy of the electron (a negative quantity)
in the Bohr model is
E(n) = -chR/n2, where
c = 299792458 m/s
is the speed of light
(Einstein's constant),
h = 6.626 10-34 J.s
is the (unrationalized)
Planck constant, and
R = 10973731 m-1 is Rydberg's constant.
(I'll neglect the so-called normal mass shift
correcting factor of
1/(1+m/M),
where m/M is the ratio of
the mass of the electron to that of the nucleus). In other words,
E(n) = (-2.18 10-18 J) / n2.
As is the case for planets around the Sun, it turns out that
the kinetic energy ½ mv2 is equal to -E(n).
The mass of the electron is
m = 0.911 10-30 kg.
So, what you get is a speed of the electron which is inversely proportional to n,
namely: v = (2190 km/s) / n.
The largest speed is for n = 1 and corresponds to about 0.73% of the speed of light,
which means it was OK to neglect relativistic effects at our casual level of precision.
If you insist on having the speed expressed in mph,
the formula is v = (4900000 mph)/n.
To obtain the period of rotation around the nucleus,
you need to know the radius of the "orbit"
(again, this is not to be seriously taken as a real trajectory),
which is aon2,
where ao= 0.53 10-10 m
is Bohr's radius.
The period is equal to 2p/v times this,
which means it is proportional to n3:
T = (1.52 10-16 s) n3.
The frequency is thus inversely proportional to the cube of n:
f = (6.58 1015 Hz)/n3,
or if you insist on using rpm's:
f = (395 000 000 000 000 000 rpm)/n3,
since 60 rpm = 1 Hz.
All this pertains to the hydrogen atom (Z = 1).
For a lone electron around a nucleus with Z protons (a so-called hydrogenoid ion),
the energy gets multiplied by Z2 and the speed is therefore multiplied by Z.
Since the size of the "orbit" is divided by Z, the frequency is multiplied by Z2.
To summarize, a lone electron would be expected to go around a nucleus with Z protons
at a speed (Z/n) Vo
and a frequency (Z2/n3 ) fo ,
where:
Vo is about 0.0073 c, 2190 km/s, 7900 000 km/h,
or 4900 000 mph.
fo is about 6.58 1015 Hz or 3.95 1017 rpm.
Note that a single electron (of charge
q = 1.6 10-19 C ) going around
a circuit at frequency f0 is equivalent to
a current q f0 of about 1 mA.
The so-called Bohr magneton
(q/2m =
9.274 10-24 A.m2)
is an important quantity which serves as a unit for whatever
magnetic moment may be associated with the orbiting electron.
Classically,
the magnetic moment associated with a current I
circulating in a loop of vectorial areaS is
m = IS.
The Bohr magneton would be the moment classically associated with an
electron actually moving at the above speed along a circular path with
a radius equal to the aforementioned Bohr radius.
(2002-06-10)
Is there anything harder than diamond?
Ultrahard fullerite is a polymerized phase of fullerene discovered in 1995,
which is the object of several patents awarded to Dr. Michael Yu.
Popov.
It is currently used in the
NanoScan (NS)
scanning force microscope (SFM).
Some experimental studies indicate that ultrahard fullerite is about
twice as hard as diamond (approximately 300 GPa, vs. 150 GPa for diamond).
Normally, fullerene crystallizes as a fairly soft yellow solid of low density
(1680 g/L) where buckyballs are held together by
van der Waals forces, similar to what holds together
the hexagonal carbon planes underlying the
structure of graphite (the density of graphite is 2267 g/L).
However, the polymerization of fullerene which occurs at high temperature
under gigapascals of pressure yields an ultrahard phase whose density
(3170 g/L)
compares to that of diamond (3516 g/L).
Under normal conditions, the resulting stable structure
leaves little room for compression...
The material is more than three times stiffer than either diamond or osmium,
according to the above table
(itself based on published acoustic properties of ultrahard fullerite).
From borazon (1957) to carbon nitride and beyond...
In 1989, Marvin Cohen and his graduate student Amy Liu (then at UC Berkeley)
devised a theoretical model to predict a crystal's stiffness
[its bulk modulus], which was thought
until recently
to be a good indicator of the more elusive quality called
hardness.
Noteworthy candidates which did not live up to expectations, according to this model,
included cubic boron nitride. (CBN is the hard form of "BN".
It was first synthesized in 1957 by Dr. Robert H. Wentorf of
the General Electric Company.
It's known in the trade as borazon.)
On the other hand, Cohen's model clearly indicated that a carbon nitride crystal
should be stiffer (and possibly harder) than diamond.
The race was on to obtain the stuff in crystalline form and measure its properties.
Some early efforts
by the team of Yip-Wah Chung (at Northwestern University) resulted in a layered composite of
titanium nitride and carbon nitride (a so-called superlattice)
which was, surprisingly, almost as hard as diamond.
Crystals of carbon nitride were apparently first synthesized at
Lawrence Berkeley Lab (LBL)
by Eugene Haller and William Hansen,
using an approach similar to the synthesis of industrial diamonds.
A 1993 patent for this new superhard material was subsequently awarded to
Cohen, Haller and Hansen.
However, the jury seems still out...
[See March 1998APS conference, and
May 2000Nature article.]
Because ultrahard fullerite is so much harder than diamond,
we may guess that it's harder than carbon nitride as well,
but we won't know for sure until someone makes a carbon nitride crystal
big enough to test...
Recently
(February 2004)
a new kind of synthetic diamond was found
to be at least 50% harder than
natural diamond.
This was obtained at the Carnegie Institution's
Geophysical Laboratory (Washington, DC)
by submitting to extreme temperatures and pressures
(2000°C, 5-7 GPa)
crystals synthesized [much faster than before]
by a new chemical vapor deposition (CVD) process.
(2002-06-10) How is Hardness Defined ?
Hardness
is the resistance to permanent surface damage...
It's totally different from elastic resilience, in spite of a loose correlation.
Unlike stiffness, which is an elastic property of a solid
[quantitatively, stiffness is simply the solid's bulk modulus],
hardness actually indicates the resistance of a solid's surface to
permanent deformation (scratching or indentation) by another solid.
Hardness is somewhat correlated with elastic moduli (the larger the moduli,
the harder the material is expected to be).
This correlation is far from perfect,
as was spectacularly demonstrated in 2002 by a measurement proving
osmium stiffer than diamond, although osmium is not nearly as hard as diamond.
(The term indentability is a less ambiguous alternative for hardness.)
Some news reports have wrongly described osmium as a "soft" metal, whereas
it is one of the hardest metals, with a Mohs hardness of 7...
Hardness does not have a theoretical definition.
Instead, it is evaluated using a number of
practical scales,
which are only roughly compatible with each other.
Hardness values obtained by conversion between such scales are
notoriously fuzzy and/or unreliable.
The oldest scale of hardness is the Mohs' scale,
which can barely be called quantitative.
It was first devised in 1812 by the German mineralogist Friedrich Mohs (1773-1839)
who published it in 1822.
This scale is based on comparisons with the materials below,
which are assigned the values listed.
If a material scratches another, it's said to be of equal or greater hardness.
Mohs' scale is popular with geologists in the field,
who can use it by carrying a kit containing the standard Mohs minerals and/or other
substances of intermediate hardness:
Lead is 1½,
a fingernail is 2½ (so are galena and gold),
a knife blade is 5½ (so is window glass),
a steel file is 6½,
tungsten is 7½ (tungsten carbide is almost 9).
It's not necessary to have an expensive diamond in such a kit,
except to "identify" other diamonds, because all other minerals
are much softer (as of 2002, only one or two synthetic substances are
known to be harder than diamond, as discussed above).
Some English speakers have been known to
memorize this sequence using an infamous
(politically incorrect) mnemonic sentence:
Those Girls Can Flirt And Other Queer Things Can Do.
The rungs in this hardness "ladder" are uneven:
According to some plastometric hardness scales (described below),
diamond (MH 10) is about 3½ times harder than
corundum (MH 9), whereas fluorite or fluorspar
(MH 4; sometimes misspelled "flourite" or "flourspar")
is only 20% harder than calcite (MH 3).
Pure corundum is colorless.
Colored corundum gemstones are called either ruby if red
(because of the presence of chromium) or sapphire otherwise
(mostly blue, in the presence of titanium).
Widely used for grinding and polishing, the emery abrasive contains
» 60% corundum (Al2O3 ),
mixed with magnetite (Fe3O4 )
and spinel (MgAl2O4 ; MH 8)
This problem with Mohs' scale has been somewhat corrected in a so-called
extended scale,
which departs from the above beyond MH 6 and assigns a hardness of 15
to diamond (instead of 10). This extended scale remains much less popular
with geologists than the above original one...
Better quantitative ratings of hardness are mostly obtained with
two very different kinds of instruments,
which may well measure different characteristics of the material under test.
One of these is known as a durometer, the other is called a plastometer
(of various types, named after the specific indenter used).
A durometer ["dur" is French for "hard"] is simply a diamond-pointed
hammer which slides under its own weight in a glass tube and rebounds off the
surface of the material under test.
The height of the rebound is measured and compared with what would be obtained
for some reference material.
If a conventional rating of 100 is assigned to high carbon steel,
this principle defines the so-called Shore scale,
which is divided into overlapping subscales (A, B, C, D, O, OO)
covering progressively softer materials with different measurement specifics.
Other hardness scales are based on the size of the indentation left by a
plastometer after pressing [usually for 30 seconds]
an object (indenter) of known geometry with a calibrated
force against a planar surface of the material under test.
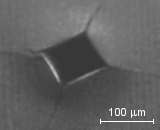
The above picture shows an oblique view of the imprint
obtained on a silicon nitride surface by applying a force of 10 kgf (about 98 N)
to a so-called "Vickers indenter"
(a diamond square pyramid with an angle of 136° between opposing faces).
Such a picture offers clues that the observed remnant is smaller than what
the indentation used to be when the indenter was still in it.
The elastic recovery which took place is properly disregarded in
the evaluation of hardness, which is supposed to be a measure of
how difficult it is to inflict permanent indentations (or scratches)
on the surface of a solid.
A plastometric hardness is then defined (in units of pressure)
as the ratio of the calibrated force to the total surface area of that part of
the indenter at rest which has the same cross-sectional area
as the observed indentation.
In those cases where the indenter is not much harder than the material under test
a theoretical correction may be needed to estimate the size of an indentation
that would have been left by an infinitely hard indenter.
This is also the correct way to extend to diamond
(and/or substances like ultrahard fullerite, the hardest stuff known to Man)
a scale like the Vickers scale, which is normally based on direct readings
from instruments with diamond indenters
(valid for ordinary materials, compared to which diamond may be considered "infinitely hard").
Kelly (Bakersfield, CA. 2001-08-29; e-mail)
I am from Guam, but now live in Bakersfield, California. [...]
I get a sunburn quicker in Guam than in Bakersfield.
I say that it's because being in Guam [latitude 13.5°N] puts me closer
to the Sun than being in Bakersfield [35.4°N]. Am I correct? [...]
Not quite so.
What you want to compare is what happens in the two locations
at the same local solar time, say noon.
You may as well compare the
situations of two points B and G on the half meridian directly facing the
Sun (noon local time) and located at the respective latitudes of Bakersfield
and Guam (the longitudes of Bakersfield and Guam are irrelevant).
Let's do a rough calculation first (always a good idea).
The Earth is almost a perfect sphere
of radius R = 6371000 m.
Because the sun is so far away, the difference in the solar distances of two points
A and B on the Earth is accurately estimated as the distance between the two
parallel planes containing A and B that are perpendicular to the rays from the Sun.
Therefore, you may observe that the difference between the solar distances of
two illuminated points on Earth may not exceed the Earth radius (R).
This overestimate is good enough for our next point...
The difference in solar distances at noon is thus [much] less
than 6371 km.
Since the Sun is about 150 000 000 km
away, this amounts to less than 0.0000425 of the distance to the Sun.
Now, the energy received from the Sun per unit of area
(physicists call it the radiant illumination)
is inversely proportional to the square of the distance to the Sun.
The difference in radiant illumination
due to the difference in solar distance is thus no more than 0.0085%.
Obviously, such a minuscule difference could not possibly account for
the observation concerning sunburns.
There's another explanation...
What's important is the angle of the Sun's rays, not the distance to the Sun!
This matter of angles also explain why summers are warmer than winters
[in the Northern Hemisphere],
in spite of the fact that the Earth happens to be closer to the
Sun in Winter than in Summer. [Believe it or not.]
The basic reason why it's colder in Winter is that each square mile of the Earth's
surface "sees" the Sun at a more oblique angle and thus receives a narrower
beam of sunlight.
Also, there's less time available between sunrise and sunset to receive the Sun's energy.
Your observation about sunburns, however, involves yet another angular aspect.
Sunburns are directly related to UV exposure in the middle of the day.
It's important to realize that the atmosphere is a natural UV filter.
The lower you see the Sun on the horizon, the thicker the filter.
At noon, the Sun is higher in Guam and will therefore burn you faster.
At sunrise or at sunset, you can't possibly get sunburned.
In Guam or in Bakersfield...
master_at_games_not
(Yahoo! 2007-07-22)
Kelvin's Thunderstorm
A nice suggestion for an experimental project in physics. [ 12th grade ]
In 1867, Lord Kelvin (1824-1907) devised a simple way to
generate high voltages by harnessing the power of...
falling drops of water.
To the best of my knowledge, this experiment has not yet been performed
in a high-school
context, but it should make a great student project...
(2007-07-24)
The Coriolis Effect: A Simple Case
A dropped object always falls to the east of a plumb line.
The Coriolis force (or Coriolis acceleration) is observed only for
something that moves with respect to a rotating frame of reference.
The beautiful mathematics involved repays study,
but it's nice to demonstrate the essentials by analyzing a simple case, using only
elementary methods :
You're on a beach near the Equator, on top of a tower (or a palm tree) of height h.
First, you draw a plumb line to make a small mark in the sand below.
Then, you drop a steel marble.
If there's absolutely no wind,
you might expect that marble to fall exactly
on the mark you just made.
Well, it will fall a few millimeters
east of the mark... Why? Let's be quantitative:
Let h be the height of your tower and R be the equatorial radius of the Earth
(it's equal to 6378137 m, but we won't need the exact value).
Let g be the normal acceleration of gravity at the Equator
(g = 9.780327 m/s2 ).
Finally, let w
denote the sidereal angular rate of rotation of the Earth, namely:
w = 2p / 86164.09
= 7.2921159 ´ 10-5 rad/s
Looking from the south in a nonrotating frame (momentarily)
at rest with respect to the center of the Earth,
the key observation is that the top of the tower and the beach have
different horizontal velocities, namely:
w (R+h) and
w R
What matters is not the huge value of those speeds (both are about
465.1 m/s, 1674.4 km/h
or 1040.4 mph) but their tiny difference.
Another way to put it is that, in a nonrotating frame of reference
(momentarily) at rest with respect to the beach, the top of the tower
is seen to have a velocity w h.
A marble dropped with zero velocity with respect to the top of the
tower is really dropped with an horizontal velocity
w h with respect to the beach and it will
maintain that horizontal velocity throughout the time (t)
it takes to hit the ground.
Thus, the marble will land at a distance
Dx =
w h t
to the east of the point marked by the plumb line.
Since h = ½ gt2,
we have:
Dx =
w h t =
w Ö(2/g) h3/2
= 0.00003297554 h3/2
The numerical coefficient applies if
Dx and h are expressed in meters.
Coriolis effect at the Equator (without air drag)
Dropping Height
Deviation to the East
10 m
1.04 mm
20 m
2.95 mm
50 m
11.66 mm
100 m
32.98 mm
200 m
93.27 mm
300 m
171.35 mm
If the experiment is carried out at a nonzero
geodetic latitude
j, then the above remains applicable, except that
the horizontal velocity of the top of the tower with respect to the ground
(in an inertial frame "tangent to" the rotating one) is now
w h cos j.
Also, the value of g to be used (which determines the duration of
the fall) is clearly the local value, which is greater than
the above equatorial value.
Dx =
cos(j) w Ö(2/g) h3/2
The geodetic latitude
j of a location is
the angle from the plane
of the equator to the local vertical.
This is the only type of latitude used in geography.
It differs from the geocentric latitude
(the angle between the equatorial plane and a line from the center
of the Eartn) since the Earth is
an oblate ellipsoid.
The "local vertical" is perpendicular to the "plane of the horizon"
(which is tangent to the Earth surface) and it doesn't
go through the center of the Earth, except for points on the
Equator or at the poles.
Eiffel Tower (from below)
The Eiffel Tower is at latitude
48°
51' 32''. Its top floor is
309.63 m
above surrounding grounds.
The local value of g in Paris
(as measured before 1901) is
9.80991 m/s2.
Neglecting air drag, a marble dropped from the top floor of the Eiffel Tower
would hit the ground 118 mmeast of the dropping
vertical, after a fall lasting about 7.9452 s.
Air resistance (no wind!) would only slow down the fall,
thus increasing the deviation to the east in
direct proportion to the increase in duration.
Dx = (14.8548 mm/s)
Dt
The Eiffel Tower has long been linked with the study of
air resistance, starting in 1903 with the experiments of
Gustave Eiffel (1832-1923) himself:
By dropping objects along a vertical cable hanging from the second floor
(149.23 m above the ground)
Eiffel obtained the most accurate aerodynamical data of that era.
He improved on this setup by building a wind tunnel next to the Tower in 1909.
The larger of the two wind tunnels he build in nearby Auteuil (in 1912)
is still operational today
(Eiffel's is the oldest aeronautical laboratory in the World).
The Leaning Tower of Pisa is located
at a latitude of 43° 43' 23'' N
(and a longitude of 10° 23' 47'' E).
At that latitude j,
the rotation of the Earth makes the top of the Tower
(h = 55 m above the ground) moves at a speed
wh cos j
relative to the ground. This results in a Coriolis deviation
Dx to the east, which is related to the time
of fall Dt by the equation:
Dx =
(w h cos j)
Dt =
(2.89846 mm/s)
Dt
Neglecting air resistance, the time of fall Dt
from a height of 55 m is about 3.35 s.
This yields a Coriolis deviation of about 9.7 mm.
Air resistance (no horizontal wind)
would only increase that Coriolis deviation a bit.
The effect is roughly 12 times less than for the Eiffel tower
because, at a similar latitude, it is proportional to the height
(h) raised to the power of 1.5...
(2007-07-26) Terminal Velocity (Settling Velocity)
In the air, the velocity of a falling object has an upper limit.
In the main, the dissipative forces which oppose the motion of a nonrotating smooth
sphere in a fluid are forces which are opposite to the sphere's velocity
(relative to the fluid). They are essentially of two distinct types:
Viscous resistance, proportional to the speed v (mostly for liquids).
Quadratic drag, proportional to v2 (mostly for gases).
If the resistive forces are (somewhat artificially) limited to the sum of those
two terms, we obtain a differential equation which can be
solved analytically.
(2007-09-22) Angular Momentum & Torque
Spin and orbital angular momentum are conceptually distinct.
A body of mass M, and center of mass C has a total (linear)
momentum p which is obtained by adding the elementary contributions
v dm of its massive elements (v is the vectorial velocity
of the infinitesimal element of mass dm):
p = ò v dm
The angular momentumL of a spinless
point-mass about a fixed origin O is defined as the cross-product
of the position r into the momentum of that point:
L =
r ´ p
=
m r ´ v
The angular momentumL of an extended collection of such
points is the sum of the angular momenta of its components:
L =
ò
( r ´ v ) dm
This breaks down into the sum of two terms:
The spin (or intrinsic
angular momentum)
and the orbital angular momentum,
(defined as the angular momentum about O of
the whole mass concentrated at the center of mass C).
L = S +
r ´ p
= S +
OC ´ p
If the center of mass is motionless, the linear momentum
p is zero and the second term vanishes.
In that case, the angular momentum L
is equal to the spin S.
Torque :
Torque is defined as the moment of an applied force.
Only an external torque can change the angular momentum of a system.
Otherwise, total angular momentum is always conserved
(even when mechanical energy isn't, as happens when there are internal friction forces).
Until 1924, it was thought that all angular momenta were of an
orbital nature, which is to say that a pointlike particle could not
have a spin. Paradoxically, modern
quantum mechanics allows such a thing.
However, the average density of spin in matter
is normally zero at the macroscopic level, so the angular momentum
of a large object can be obtained as the sum of the orbital
momenta of tiny spinless constituents.
(2017-06-19) Example of an Ad Hoc Conservation Law
A case where neither mechanical energy nor momentum are conserved.
In a given physical system,
the French call intégrale première (du mouvement)
any function of the relevant generalized coordinates
which would be constant over time in any actual motion.
Some examples are:
Total mechanical energy in the absence of heat dissipation.
It's always a good idea to try very hard to find what remains the same in an
evolving system. This may well turn difficult questions into easy ones.
The Chameleon Problem
is a nice recreational example.
The concept is mostly used in the context of
analytical mechanics
where all forces are conservative. Below is a rare example where such a conserved quantity
exists in the presence of dissipative forces (friction).
Consider two cylinders which can rotate freely
(without friction) at different rates around two distant parallel axes.
If the rims of the cylinders are brought into contact, friction will slow down one
cylinder and speed up the other until the two circumferential speeds are equal
(so that there's no longer any slipping at the rims).
Question :
Express the final rates of rotation (W1, W2)
as functions of the initial rates (w1, w2)
knowing the radii (R1, R2) of the cylinders and their
moments of inertia (J1, J2)
around their respective axes of revolution.
Note that the friction forces are internal forces which do not modify the system's total
angular momentum. However, external forces must be applied to the
axes to keep them in place and those do modify the total angular momentum.
Thus, neither the mechanical energy nor the angular momentum are conserved.
We need another ad hoc conserved quantity...
Answer :
By Newton's third law,
the two friction forces exerted by one rim upon the other are opposite to each other.
Let's call them F and -F.
For either cylinder, the rate of change of the angular momentum around
the central axis is the moment of the friction force applied at its rim:
Eliminating W2
between those two equations, we deduce:
R1 . W1
( J1 / R12 + J2 / R22 ) = k
A similar relation holds for the other cylinder and we may use the defining expression of k
(in term of the previous rates) to obtain the solution:
In the special case of two solid cylinders of given thickness
made from the same homogeneous material, the moment of inertia is proportional
to the fourth power of the radius (it's what the formula ½MR2 implies
when M is proportional to the square of R). The above formulas become:


 rsg160 (
rsg160 (
 (2002-01-27) Lewis Carroll's Monkey
(2002-01-27) Lewis Carroll's Monkey
 (2007-01-03) Galilean Cannon
(2007-01-03) Galilean Cannon

 (
(



 A and B on the Earth is accurately estimated as the distance between the two
parallel planes containing A and B that are perpendicular to the rays from the Sun.
Therefore, you may observe that the difference between the solar distances of
two illuminated points on Earth may not exceed the Earth radius (R).
This overestimate is good enough for our next point...
A and B on the Earth is accurately estimated as the distance between the two
parallel planes containing A and B that are perpendicular to the rays from the Sun.
Therefore, you may observe that the difference between the solar distances of
two illuminated points on Earth may not exceed the Earth radius (R).
This overestimate is good enough for our next point...